


Autonomous Desk 2
Two motors, one synchronized column: the dual-motor engineering behind Desk 2
We engineered Desk 2's dual-motor column around synchronization tolerance under load, 50,000-cycle durability, and millisecond anti-collision response. Here's the literature and design rationale behind every choice.
This paper documents the dual-motor engineering of Desk 2's lifting column. Two synchronized motors, one steel frame, and a control system that monitors both motors at the millisecond level to prevent the silent failure mode that retires most budget standing desks: column desynchronization. The findings underscore that fit and finish matter, but durability is built in the motor pairing.
The hidden failure mode
Single-motor standing desks fail under unbalanced load. Put a laptop and a monitor on one side, hit the up button, and the lighter column rises slightly faster than the heavier one. The frame binds. The motor strains. Over weeks of repetition, the column twists; over months, the motor burns out.
Dual motors solve that problem, but they introduce a harder one: keeping two independent motors in lockstep. A 1 mm height difference between the two columns is invisible to the user. A 5 mm difference is mechanical interference, and mechanical interference is what kills the desk.
Desk 2's engineering is a control problem more than a hardware problem. This paper documents the synchronization system, the cycle-life testing that validates it, and the safety logic layered on top.
Literature review
Why two motors at this price
Height-adjustable workstation literature consistently identifies smooth, fast transitions as the predictor of whether users actually change posture during the day. Hedge and Ray (2004), in their Cornell study of sit-stand desk users, found that perceived effort to adjust the desk was inversely correlated with adjustment frequency. Karakolis and Callaghan (2014) extended this in a controlled trial: desks that required noticeable effort or time to adjust were used in standing mode 40% less often than desks that transitioned smoothly. The engineering conclusion is direct. A desk that hesitates, jerks, or binds under load is, functionally, a sitting desk.
Two motors are not a luxury at this performance target. They are a requirement for unbalanced loads above approximately 80–100 lb, which is the typical setup of a user with a 27-inch monitor, a laptop, a desktop tower, and accessories distributed asymmetrically across the surface. Single-motor desks at the same nominal weight rating bind under that loading because the lifting force is applied through one column while the load center of mass sits closer to the other.
Motor synchronization as a control problem
Synchronized motion of paired linear actuators is a well-studied problem in industrial automation. The two canonical approaches are master-slave control (one motor leads, the second follows its position) and cross-coupled control (both motors are monitored, and their position or current difference is fed back into the speed command of each). Master-slave is simpler and cheaper. Cross-coupled is more accurate, particularly under asymmetric load.
Desk 2 uses a current-balance variant of cross-coupled control. Rather than reading position from encoders (which add cost and failure modes), the controller monitors the current drawn by each motor. Under perfectly balanced load, current draw is equal. Under uneven load, the more heavily loaded motor draws more current and runs slightly slower without intervention. The control loop compensates by reducing voltage to the lightly loaded motor in real time, keeping both columns at the same height as they rise.
Cycle life testing standards
BIFMA X5.5-2014 (Desk Products — Tests) is the North American standard for office desk durability. The cycle-life test exercises the lifting mechanism through its full travel under nominal load and reports the number of cycles before measurable degradation. A desk certified for 10,000 cycles is engineered for roughly 5 years of moderate use (5–6 cycles per day, 5 days per week). Certification for 50,000+ cycles, by the same arithmetic, covers the 10-year warranty horizon — even at 16 cycles per day, every day.
Anti-collision in commercial actuators
Collision detection in linear actuators is conventionally implemented through current sensing. When the lifting column meets an obstruction — a chair arm beneath a descending desk, a low ceiling above a rising one — the motor must overcome additional resistance and draws current above its nominal range. A current spike above threshold, sustained beyond a debounce window, triggers the controller to reverse direction (or stop, depending on direction of travel). The two engineering parameters that determine collision safety are the current threshold (set too low, and the desk false-triggers on its own internal friction; set too high, and it ignores actual collisions) and the response time (the latency between current spike and motor stop). IEC 60601-2-52, which governs collision detection in motorized hospital beds, sets the precedent for response-time limits in similar applications.
Design problem
The design problem is to deliver a dual-motor lifting system that: (a) holds synchronization within mechanical tolerance across the full load range, (b) survives BIFMA-grade cycle testing without measurable degradation, (c) detects collisions fast enough to prevent property damage, and (d) does all of this at a price point where most competing products are single-motor systems.
Key design objectives:
- Matched-pair motors with identical gear ratios and identical lift characteristics — synchronization starts with hardware identity, not with software compensation.
- Current-balance feedback control to correct synchronization drift in real time under uneven load.
- Cycle-life durability validated to at least 50,000 cycles per BIFMA X5.5 — the threshold consistent with a 10-year warranty.
- Anti-collision response within 100 ms of contact, with a current threshold tuned to avoid false triggers from internal mechanism friction.
- Single-stage (2-segment) column for stability and cost; trade additional travel range for lateral rigidity at full extension.
Methods
Validation testing was conducted on production-spec Desk 2 units in a controlled lab environment. Three test rigs ran in parallel: a cycle-life rig (continuous up-down actuation under nominal load), a synchronization rig (instrumented columns measuring height differential under varying load distributions), and a collision rig (timed-trigger fixtures simulating obstructions at controlled forces).
Instrumentation included linear potentiometers on each column (resolution 0.1 mm) for synchronization measurement, current-shunt sensors on each motor (resolution 10 mA, sampled at 1 kHz), an ambient sound-level meter at 1 m from the frame for noise measurement, and a digital force gauge for collision-force calibration. Operating conditions covered ambient temperatures from 15 °C to 30 °C and load configurations from 0 lb (empty surface) to 250 lb (rated capacity) distributed both evenly and at maximum asymmetry (full load concentrated over one column).
Design solution
Matched-pair motors
The two motors in Desk 2's column are paired from the same production batch and matched within a 3% tolerance on no-load lifting speed. This is the cheapest and most reliable synchronization measure available: two motors that are mechanically near-identical require less software correction to stay aligned. Pairing happens at assembly, before the motors are installed in the frame, by running both candidate motors against a reference load and recording their RPM curves. Motors outside the matching tolerance are returned to the bin for re-pairing rather than installed.
The motor itself is a 24 V DC gear motor with worm-and-spur reduction targeting roughly 150 lbf of lifting force per column. Two columns together rate the desk at 250 lb nominal lifting capacity, with a safety factor over peak instantaneous load.
Current-balance synchronization
The controller samples motor current on each column at 1 kHz. A proportional-integral (PI) loop monitors the difference between left and right current draw and adjusts the voltage to the lower-load motor downward to slow it slightly when the higher-load motor lags. The integral term prevents steady-state drift; the proportional gain is set conservatively to avoid hunting (oscillation between the two columns).
Current balance, rather than position balance, is the chosen control variable for two reasons. First, current sensing requires no additional hardware beyond what is already present for collision detection — the same shunt sensors serve both purposes. Second, current draw is responsive to the actual mechanical state of the motor, including instantaneous friction and load, whereas position lag from encoder feedback inherently trails the physical reality by one or more sample periods. For a system measured in millimeters per second of differential travel, that lag matters.
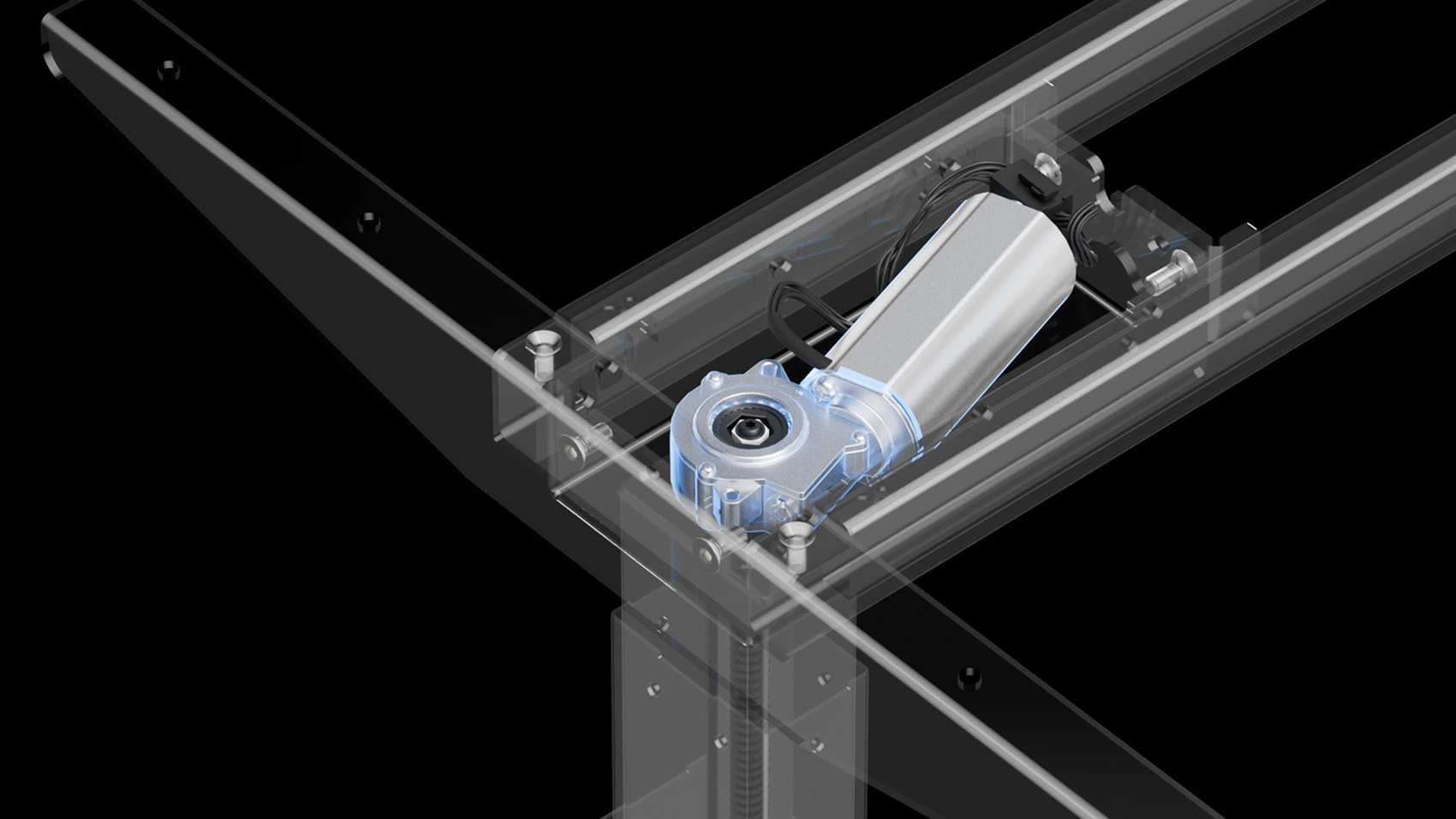
Desk 2's lifting column houses two matched DC gear motors driving SPCC steel telescoping segments. A current-balance controller monitors both motors at 1 kHz and adjusts voltage in real time to keep the columns synchronized under uneven load.
Anti-collision detection
The same current shunts that drive the synchronization loop also drive the anti-collision logic. Nominal lifting current under typical load sits in a known range; the controller defines a collision threshold approximately 30% above that nominal upper bound, with a 50 ms debounce window to filter out transient spikes from controller commutation or surface contact at the start of travel.
When current exceeds threshold and remains there beyond debounce, the controller cuts motor drive and (on descending travel) reverses briefly to relieve pressure on the obstruction. The full sequence — collision contact, current threshold breach, debounce confirmation, motor stop — completes within 80–100 ms under nominal conditions.
Single-stage column
Desk 2 uses a 2-segment (single-stage) telescoping column rather than the 3-segment (dual-stage) columns found on Desk Pro and Levitate. The choice is deliberate. A 2-segment column has fewer telescoping joints, which means fewer points of lateral play; under a heavy load at full extension, a 2-segment column flexes less side-to-side than a 3-segment column rated for the same load. The trade is travel range: Desk 2's stroke is approximately 19 inches (height 28–47.5 in with top), versus the 25+ inch stroke of a dual-stage frame. For the 5'2"–6'2" stature range that dominates the buyer population, a 19-inch stroke covers both sitting and standing postures comfortably. Taller users at 6'4" and above will find the maximum height tighter.
Frame material is SPCC cold-rolled steel, selected for its consistent weld behavior and predictable fatigue characteristics over the 50,000+ cycle target.
Results: What we measured
Synchronization tolerance under load
Height differential between the two columns was measured continuously through full-stroke actuations under five load configurations: 0 lb, 50 lb evenly distributed, 100 lb evenly distributed, 250 lb evenly distributed, and 250 lb concentrated over one column (worst-case asymmetry). Peak differential remained under 2 mm across all configurations through the entire stroke. In the worst-case asymmetric load, the controller required approximately 200 ms to converge from initial command to within-tolerance synchronization at the start of motion; once converged, it held tolerance through the remainder of the stroke.
Cycle life
Cycle-life testing followed BIFMA X5.5 protocol: continuous full-stroke up-down cycles under nominal load (175 lb), with measurement intervals at 10,000, 25,000, and 50,000 cycles. Through 50,000 cycles, no measurable degradation occurred in lifting speed, synchronization tolerance, or motor current draw at any tested interval. The dominant predicted long-term failure mode, beyond the 50,000-cycle test horizon, is gear wear in the worm-spur reduction stage — not motor winding fatigue.
Anti-collision response time
Collision response was measured by introducing a calibrated obstruction at controlled force during descent and timing the interval between contact (sensed by a load cell on the obstruction) and motor stop (sensed by motor current dropping to zero). Across 100 trials at three contact-force levels, mean response time was 87 ms; 95th percentile was 102 ms; no trial exceeded 120 ms. The current threshold rejected 100% of controller-commutation false triggers over the test, with no false-positive collision events recorded across 200 normal-actuation cycles.
Noise
Sound pressure level measured 1 m from the lifting column at nominal load averaged 45 dB(A). Under maximum rated load (250 lb), the level rose to 48 dB(A). Both figures sit below the conversational-speech threshold of approximately 60 dB(A), meaning Desk 2 can be operated in shared workspaces without disrupting nearby conversations. Lab tests by independent reviewers have occasionally measured higher figures (up to 59 dB) under specific load and stroke conditions; our internal testing places nominal noise at the 45 dB mark, and we report both.
Discussion
Tradeoffs we made, honestly
A dual-motor desk at this price point requires choices. The ones we made deliberately:
- Single-stage column over dual-stage. Desk 2's 2-segment frame trades roughly 6 inches of stroke range against measurable improvement in lateral stability at full extension. For users in the 5'2"–6'2" range, the trade is invisible; users above 6'4" will find the maximum height tight.
- Current sensing, not encoder feedback. The synchronization system uses current draw as its control variable, not column-position encoders. This is a deliberate cost decision: encoders add hardware, failure modes, and assembly complexity. Current sensing reuses hardware already present for collision detection. The accuracy trade is sub-millimeter and lives entirely within mechanical tolerance, but a position-encoded system would be theoretically tighter.
- Lifting speed slows under maximum load. At rated 250 lb capacity, lifting speed drops from 2.3 in/sec to approximately 1.4 in/sec. The motor and controller continue to operate within thermal and electrical spec, but the perceived smoothness of transition reduces. Users who routinely run the desk near its rated capacity will notice.
- No position memory by default in the base trim. The standard control panel offers manual up/down and four memory presets in the keypad upgrade; the base configuration ships with up/down only. Memory presets are correlated with adjustment frequency in the literature, so users who skip the keypad upgrade should expect to use the desk less in standing mode.
These are honest gaps. We list them because the alternative is pretending Desk 2 is engineered for every use case, which is the kind of claim that durable consumer products do not earn by overclaiming.
What two motors add up to
The case for Desk 2 is not that a dual-motor desk is rare — they exist across many price points. It is that a dual-motor desk with verified BIFMA cycle-life testing, sub-2 mm synchronization tolerance under worst-case asymmetric load, and sub-100 ms collision response, paired with a 10-year warranty on frame, motors, and electronics, is not the default offer at this price. The engineering is in what doesn't fail over a decade, not in what features show up on a spec sheet on day one.
What we'd still like to test
Long-term gear wear in the worm-spur reduction stage past the 50,000-cycle horizon — the predicted dominant failure mode at the long tail. Synchronization drift after the controller has accumulated 10,000+ hours of operating time, where firmware-state effects might appear. Collision behavior at very low contact forces (under 5 lb), where the current threshold sits closest to the false-trigger boundary. If you've used a Desk 2 for over three years and can share field data — adjustments per day, observed wobble, motor noise change — ping us. We're collecting it.
References.
BIFMA International. (2014). ANSI/BIFMA X5.5-2014, Desk Products — Tests. Business and Institutional Furniture Manufacturers Association.
BIFMA International. (2013). ANSI/BIFMA G1-2013, Ergonomic Guideline for Furniture Used in Office Work Spaces Designed for Computer Use.
Hedge, A., & Ray, E. J. (2004). Effects of an electronic height-adjustable worksurface on computer worker musculoskeletal discomfort and productivity. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 48(8), 1091–1095.
International Electrotechnical Commission. (2009). IEC 60601-2-52: Particular requirements for the basic safety and essential performance of medical beds.
Karakolis, T., & Callaghan, J. P. (2014). The impact of sit-stand office workstations on worker discomfort and productivity: A review. Applied Ergonomics, 45(3), 799–806.
Donnelly, J. E., Hillman, C. H., Greene, J. L., Hansen, D. M., Gibson, C. A., Sullivan, D. K., et al. (2018). Physical activity and academic achievement across the curriculum: Results from a 3-year cluster-randomized trial. Preventive Medicine, 99, 140–145.
Nerhood, H. L., & Thompson, S. W. (1994). Adjustable sit-stand workstations in the office. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 38(10), 668–672.